How to Make a Quadcopter? : Introduction
This tutorial will walk you through the process of making a DJI Naza V2 Flight Controller based Quadcopter. You can also use this tutorial as a reference to make any Quadcopter with any Flight Controller.
This tutorial involves components that are expensive and dangerous. Please take proper protection and supervision. Quadcopters or Drones are fun to make and fly but things can get quickly out of hand if handled with negligence, so be careful. Please follow the local aviation laws while flying.
What is a Quadcopter?
A quadcopter, also called a quadrotor helicopter or quadrotor, is a multirotor helicopter that is lifted and propelled by four rotors. Quadcopters are classified as rotorcraft, as opposed to fixed-wing aircraft, because their lift is generated by a set of rotors (vertically oriented propellers).
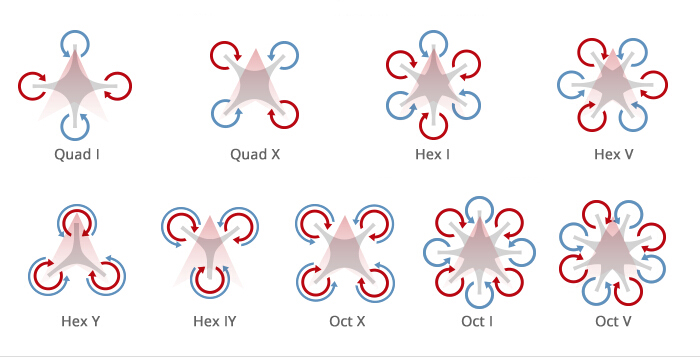
Quadcopters generally use two pairs of identical fixed pitched propellers; two clockwise (CW) and two counterclockwise (CCW). These use an independent variation of the speed of each rotor to achieve control. By changing the speed of each rotor it is possible to specifically generate a desired total thrust; to locate for the centre of thrust both laterally and longitudinally, and to create a desired total torque, or turning force.
Each rotor produces both a thrust and torque about its centre of rotation, as well as a drag force opposite to the vehicle’s direction of flight. If all rotors are spinning at the same angular velocity, with rotors one and three rotating clockwise and rotors two and four counterclockwise, the net aerodynamic torque, and hence the angular acceleration about the yaw axis, is exactly zero, which means there is no need for a tail rotor as on conventional helicopters. Yaw is induced by mismatching the balance in aerodynamic torques (i.e., by offsetting the cumulative thrust commands between the counter-rotating blade pairs).A quadrotor hovers or adjusts its altitude by applying equal thrust to all four rotors.
https://en.wikipedia.org/wiki/Quadcopter
A quadrotor adjusts its yaw by applying more thrust to rotors rotating in one direction.
A quadrotor adjusts its pitch or roll by applying more thrust to one rotor and less thrust to its diametrically opposite rotor.
Bill of Materials
- DJI Naza-M V2 – COMPACT DESIGNED MULTIROTOR AUTOPILOT SYSTEM
- GPS Module / Compass
- LED Module
- Power Management Module
- Flight Controller Module
- T-Motor Air Gear 350 Combo Pack
- AIR2213 KV920 Brushless Motor x 4pcs
- T9545 Self-Tightening Props x 2CW+2CCW
- AIR20A ESC x 4pcs
- Quadcopter F450 Frame / Similar Frame with power distribution board in it
- Li-Po Battery 3S 5000mAh
- Battery Connector – T Male / Female
- Miscellaneous Items like Screws, Nuts, Bolts, Wires and etc.
dronerative.com
Build Video
Steps to Build a Quadcopter / Multicopter
Time needed: 5 hours
How to Make a Quadcopter | Multicopter | Homemade |DIY
- Select the Right Components
Selecting the right components for your Multicopter could be tough and it involves calculations. It is all about the balance between Thrust, Weight and Battery backup of your Multicopter.
- Calculate the Payload Capacity of your Multirotor
Payload Capacity = [ Motor Thrust * Number of Motors * Hover Throttle % ] – Weight of Multirotor
Ideally, you have to hover the Multirotor at 50-75% Throttle. Remaining Throttle will be used for manoeuvring. If you choose a Motor and Propeller such that it produces 1kg Thrust per Motor with a self-weight of 1kg. Then the Effective Payload Capacity at 50% Throttle will be [1*4*.5]-1 = 1kg
You can Invert the Equation to find any other variable.
You can use a more advanced online calculator here to calculate better and more parameters https://ecalc.ch/xcoptercalc.php - Quality of Components
There are lot of brands available for Multirotor components and it is always advised to buy the good quality products for Multirotors especially the Motors and ESCs. Cheap one fails quite often and a failure during flight will lead to critical damage or complete loss.

- Flight Controller
There are an overwhelming amount of Flight Controllers available in the market. It all depends on your budget and feature you want. Here are few Links to help you compare and understand the available products.
http://multicopter.org/wiki/Multicopter_Table
http://www.rcdronegood.com/flight-controller-board-comparison/
I Personally choose the DJI Naza M V2 as It has a reputation and the required features.
- ESC [ Electronic Speed Controller ]
ESCs are responsible to deliver Electrical Power to the Motors and the Specifications of ESCs are directly dependent on the Motor’s Specification. Two important parameters are the Current and the Voltage. If a Motor needs 12V 10A then you should get a 3S 15A or 3S 20A ESC ie. 1.5 to 2 times of the Motor Current Rating. A higher current reduces thermal loss on the ESC as well as will be more efficient in delivering high Current Bursts and will have a longer life.
Another parameter you have to check is the compatibility between your Flight Controller and the ESC. Some ESC works on Digital Bus some on Analog. You can read more here.
http://learningrc.com/rc-communication-protocols/
https://fpvsampa.com/esc-firmwares-and-protocolos/ - GPS Module / Compass
Having a GPS Module and Compass gives you a lot of added features like better stable hovering [drift resistant], return to home, path planning etc.

- BLDC Motors

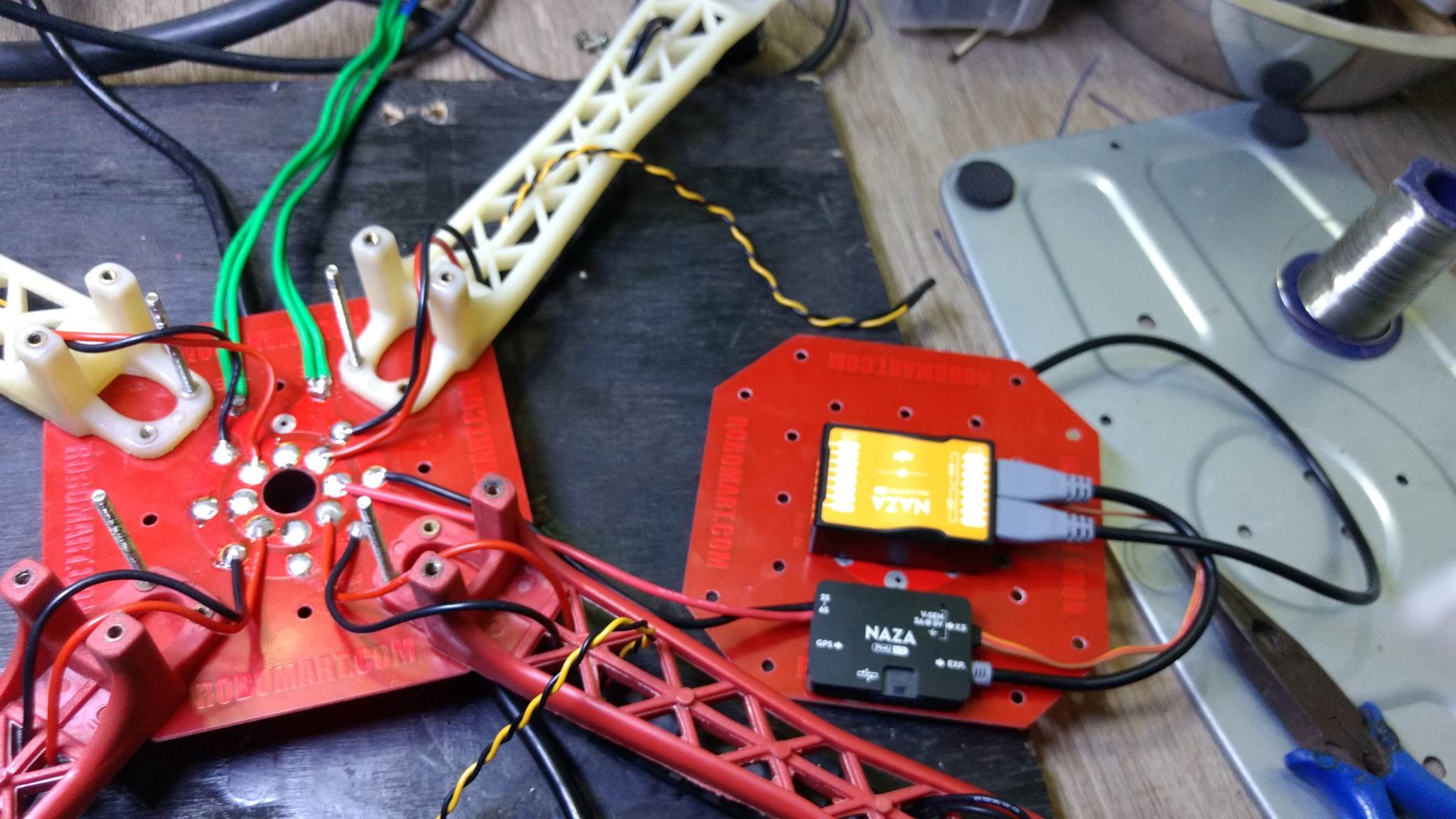
- Assembling the Quadcopter Frame

- Assembling the Quadcopter Flight Controller
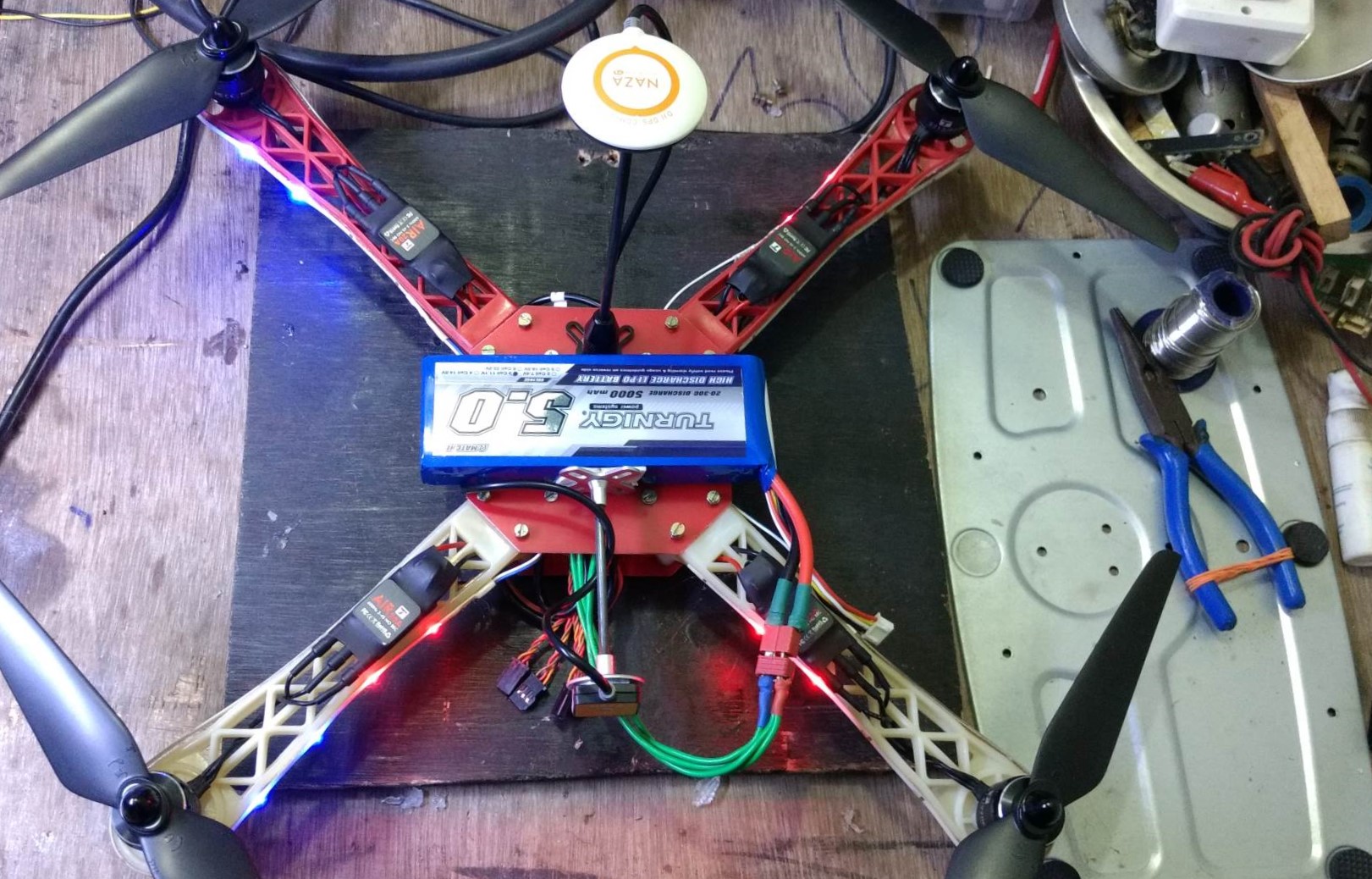
- After Complete Assembling of Quadcopter

- Quadcopter Power On Smoke Test
- Follow the Calibration manual of Flight Controller of the Quadcopter









Flight Test
Thank You for Reading You are
Happy Making and Hacking 😊
Liked this content? Please Subscribe / Share to support this Website! 😇


0 Comments